طُوّر جيل كامل من الروبوتات المتسلقة باستخدام تصميم مستوحى من زعانف الأسماك، فقد شارك فريق بحث دولي من قسم الميكانيكا الحيوية، من جامعة كيل (CAU)، تحت قيادة جامعة جنوب الدنمارك (SDU)، في تحسين وظيفة التسلق المستوحاة من الحشرات، وتنفيذ المهمة الصعبة بتطبيقها على الروبوتات.
[caption id="attachment_114316" align="aligncenter" width="554"]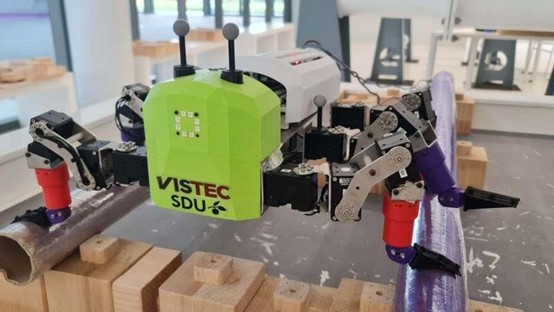 بأقدام مستوحاة من الحشرات، يمكن للروبوتات أيضًا المشي فوق السطوح الصعبة مثل الأنابيب أو الصخور.[/caption]
بأقدام مستوحاة من الحشرات، يمكن للروبوتات أيضًا المشي فوق السطوح الصعبة مثل الأنابيب أو الصخور.[/caption]
إذ طبقوا الخاصية على مكونات القدم أول مرة، بعدما كانت في أجزاء اليد، ولن يسمح هذا للروبوتات فقط بامتلاك زمام الأمور على نحو أفضل وفقدان مقدار أقل من الطاقة، ولكن أيضًا المشي بسلاسة على الأسطح غير المستوية. وقد نُشرت النتائج في مجلة Advanced Intelligent Systems على غلاف العدد.
يمكن للعديد من الروبوتات إحاطة الأشياء المستهدفة بأجزائها القابلة للالتصاق وإمساكها بإحكام دون مجهود يُذكر. تتحور الهياكل الذكية المتخصصة بأداء مهمة الالتصاق بالأسطح، ويعتمد هذا على ما يسمى بأثر الأشعة الزعنفية Fin-Ray.
يقول أستاذ علم الحيوان ستانيسلاف غورب من جامعة كاليفورنيا، واصفًا هذه الظاهرة : «إنه أمر رائع، إذا ضغطت على جانب واحد من مثلث حاد، فلن ينحني بعيدًا عنك ويبقى هناك (كما قد تتوقع)، بل سيعود نحوك. فهو لا يستسلم لتأثيرك، بل يرتد في الاتجاه الذي يأتي منه الضغط».
منذ ما يقرب من 25 عامًا، لاحظ عالم الأحياء الألماني لايف كنيزي هذه الخاصية أول مرة في زعانف الأسماك، إذ تتكيف على نحو مثالي مع ظروف التيار المختلفة. اكتشف أن السبب يكمن في الهيكل الداخلي لزعنفة الذيل.
يمكننا أيضًا العثور على حزم عرضية (crossbeams) مماثلة في أجزاء القدم للعديد من الحشرات. تساعد تلك الحزم الحشرات على التعامل مع الأسطح والالتصاق بها على نحو آمن.
يلخص غورب موضوع مجموعته البحثية بجامعة كيل تحت عنوان (التشكل الوظيفي والميكانيكا الحيوية الوظيفية)، ويقول: «تلك أحد أسئلة البحث الرئيسية لدينا: كيف يمكن للحشرات أن تلتصق جيدًا بالأسطح دون استخدام الكثير من القوة؟ كيف تنشئ نقطة الاتصال اللازمة مع الأسطح؟».
فحص غورب مع فريقه أقدام الحشرات المختلفة، مثل أقدام الجنادب، بينما ثُبتت الحزم المتقاطعة في قوابض الروبوتات المحاكية للأشعة الزعنفية، بزاوية 90 درجة، كان لزاوية التصاق الحشرات رأي آخر.
بالنسبة لتأثير الأشعة الزعنفية، لم تُجرى قبلًا دراسات مفصلة حول تأثير تغيير الزوايا بين الحزم المتقاطعة، وقد استخدم باحثو كيل الآن عمليات المحاكاة الحاسوبية لحساب القوى التي ستؤثر في الأطراف المتسلقة كما الأسطح في كل حالة، وتحققوا من نتائجهم بمقارنة التجارب وقياسات القوة مع النماذج الهيكلية الخاصة بالطابعة ثلاثية الأبعاد.
تطبيقات جديدة لتكنولوجيا التسلق؟
قال غورب: «فور تقليل الزوايا، يلتصق الجزء الآلي بسلاسة حول الأشياء لتوفير ثبات أقوى مع بذل مجهود أقل».
قال المؤلف الأول بورامات مانونبونغ، أستاذ في علم الروبوتات الحيوية في جامعة جنوب الدنمارك (SDU) ومعهد للعلوم والتكنولوجيا في تايلاند (VISTEC): «هذا يعني أنه يمكننا توفير ما يصل إلى نحو 20% من طاقة الروبوتات، دون حاجة لاستباق الخُطى».
وأضاف: «يمكننا استخدام آلية الالتصاق في قابض الروبوت حتى يتأتى له التعامل مع العناصر الحساسة جدًا والهشة، مثل الأطعمة، وفي تلك سيبذل مجهودًا أقل نسبيًا. بل قد يرقى تأثير هذا النهج إلى طفرة في صناعة القابضات الآلية».
كانت لبنة العديد من المشاريع المشتركة منذ بضع سنوات، عندما أمضى مانونبونغ فصلًا دراسيًا في كيل بناءً على دعوة من غورب، بوصفه عضوًا مشاركًا من الأساتذة الزوّار الإسكندنافيين لجامعة كيل (CAU).
[caption id="attachment_114315" align="aligncenter" width="554"]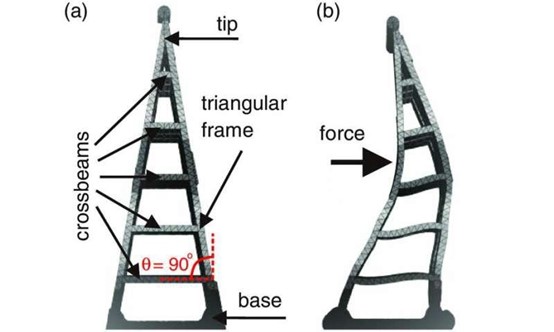 أثر الأشعة الزعنفية: إذا ضغطنا على المثلث الحاد مع وجود حزم متقاطعة داخله، فإنه لا يرتخي للداخل، ولكن يرتد مرة أخرى في الاتجاه الذي جاء منه الضغط.[/caption]
أثر الأشعة الزعنفية: إذا ضغطنا على المثلث الحاد مع وجود حزم متقاطعة داخله، فإنه لا يرتخي للداخل، ولكن يرتد مرة أخرى في الاتجاه الذي جاء منه الضغط.[/caption]
أخيرًا، اختبر فريق جامعة كيل ما سيحدث إذا طبقوا وظيفة الإمساك المحسنة تلك في أجزاء القدم، بوصفها خطوة تالية لتطبيقها على اليد. طوّر الباحثون أقدامًا روبوتية مع حزم متقاطعة بالداخل عند زوايا مختلفة، ما يسمح للقدم بالتحلّق حول الأحجار أو الأنابيب وزيادة رقعة الاحتكاك مع السطح ومن ثم الالتصاق. أجريت الاختبارات في جامعة جنوب الدنمارك في مدينة أودنسه، حيث خُصص طريق لقدم روبوت واحدة لتجربة المشي على أنبوب.
وفي معهد التكنولوجيا في مدينة رايونغ بتايلاند، وقع الاختيار على روبوت سداسي الأرجل للمشي عبر مجموعة من الأنابيب أو التعرجات الصخرية.
حينها، فطنوا إلى أن الزاوية المثلى للحزم المتقاطعة، أي عند 10 درجات، تتطلب طاقةً أقل بكثير وتستأثر بتسهيل الحركة عن الزاوية التقليدية للحزم المتقاطعة، أي عند 90 درجة، وقال مانونبونج: «سيخدم الاكتشاف صناعة النفط والغاز».
[caption id="attachment_114314" align="aligncenter" width="461"]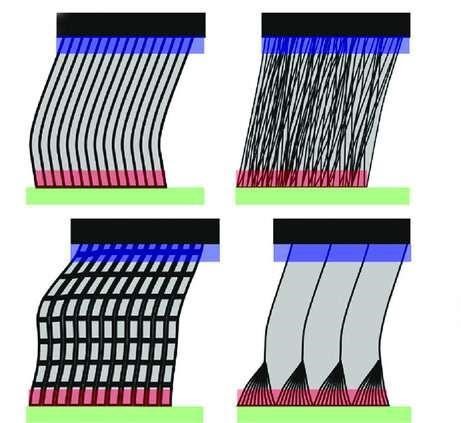 قد يوفر تنوع البنية الداخلية لأقدام الحشرات رؤى لتحسين وظائف الالتصاق عند الروبوتات: تُظهر المخططات (في اتجاه عقارب الساعة من أعلى اليمين) نوعًا شبيهًا بالألياف (معظم الحشرات)؛ نوع يشبه الزبد موجود في الزيز (نصفيات الأجنحة)؛ النوع الهرمي الموجود في الجندب (مطبقة الأجنحة) الموضح في a))؛ نوع خيطي رقيق في نحل العسل (غشائيات الأجنحة).[/caption]
قد يوفر تنوع البنية الداخلية لأقدام الحشرات رؤى لتحسين وظائف الالتصاق عند الروبوتات: تُظهر المخططات (في اتجاه عقارب الساعة من أعلى اليمين) نوعًا شبيهًا بالألياف (معظم الحشرات)؛ نوع يشبه الزبد موجود في الزيز (نصفيات الأجنحة)؛ النوع الهرمي الموجود في الجندب (مطبقة الأجنحة) الموضح في a))؛ نوع خيطي رقيق في نحل العسل (غشائيات الأجنحة).[/caption]
رغم أن النتائج واعدة، فإن بطل هذا البحث مصنوع من مادة ناعمة جدًا، لذا يواجه الفريق الآن التحدي المتمثل في صنع قابض لا ينحني ويلتصق فحسب، بل سيكون أيضًا قويًا قادرًا على الاحتفاظ برونقه وفعاليته في البيئات المختلفة.
اقرأ أيضًا:
هل يمكن للبشر التفاعل مع الروبوتات وتعليمها المهارات الاجتماعية؟
ترجمة: عصماء عصمت
تدقيق: حسام التهامي
مراجعة: حسين جرود
الكاتب
عصماء عصمت