لا بد أن نكون قد شاهدنا تلك المقاطع الرائعة للزرافات أو المهر حديثة الولادة وهي تحاول تعلم المشي على أرجلها المهتزة، وتتعثر قبل أن تتقن الحركة في النهاية.
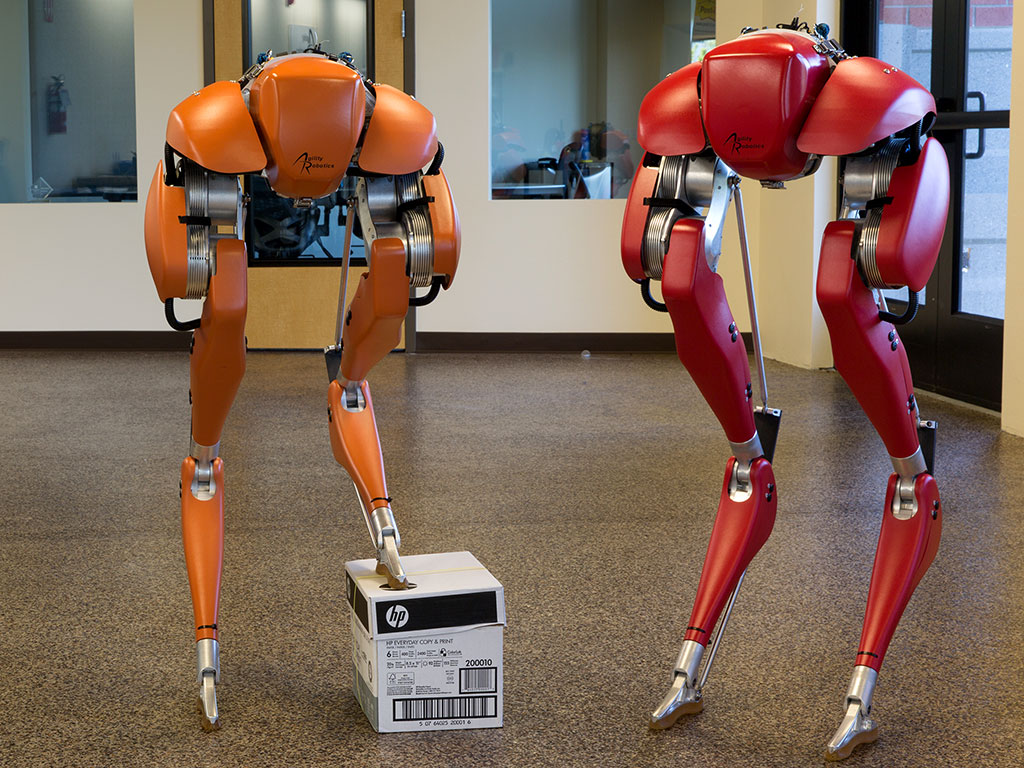
أراد الباحثون معرفة كيف تتعلم الحيوانات المشي وكيف تتعلم من عثراتها، ولمحاكاة الأمر، أتموا صناعة روبوت بحجم كلب وبأربع أرجل، وذلك وفقًا لدراسة جديدة نُشرت في مجلة ذكاء الآلة الطبيعي Nature Machine Intelligence.
وجد الباحثون أن الروبوت، بحبله الشوكي الافتراضي، استغرق ساعة واحدة فقط ليتمكن من المشي.
يُعد النهوض والسير بسرعة أمرًا ضروريًا في مملكة الحيوانات لتجنب الحيوانات المفترسة، ولكن تعلّم كيفية تنسيق عضلات الساق والأوتار يستغرق وقتًا.
في البداية، تعتمد الحيوانات الصغيرة بشكل كبير على ردود فعل الحبل الشوكي القاسية لتنسيق التحكم في العضلات والأوتار، إذ تساعدهم هذه الردود على تجنب السقوط وإيذاء أنفسهم خلال محاولاتهم الأولى.
تجب ممارسة المزيد من التحكم الدقيق في العضلات حتى يتكيف الجهاز العصبي مع العضلات والأوتار، وعندها يستطيع الصغار مواكبة البالغين.
يقول المؤلف الأوّل الدكتور فيليكس روبيرت، وهو طالب دكتوراه سابق في مجموعة أبحاث الحركة الديناميكية في معهد ماكس بلانك للأنظمة الذكية (MPI-IS) في ألمانيا: «بصفتنا مهندسين وعلماء روبوتيات، سعينا إلى تحقيق الأمر عن طريق بناء روبوت يتميز بردود أفعال مثل الحيوان تمامًا ويتعلّم من الأخطاء». تابع روبيرت: «إذا تعثّر حيوان، فهل هذا خطأ؟ ليس إذا حدث مرة واحدة. لكن إذا تعثر الروبوت بشكل متكرر، فإنه يعطينا مقياسًا لمدى جودة سير الروبوت».
بناء الحبل الشوكي الافتراضي لتعلم كيفية المشي
صمم الباحثون خوارزمية تعليمية لتعمل حبلًا شوكيًا افتراضيًا للروبوت، يُطلق عليها مولد الأنماط المركزي (CPG). في البشر والحيوانات، يكون مولد الأنماط المركزي عبارة عن شبكات من الخلايا العصبية في الحبل الشوكي التي،تنتج تقلصات دورية للعضلات دون أي تدخل من الدماغ. هذا مهم جدًا للقيام بالمهام اللا إرادية مثل التنفس والغمز والهضم والمشي.
تمت محاكاة مولد الأنماط المركزي وتصميمه على كمبيوتر صغير وخفيف الوزن يتحكّم بحركة أرجل الروبوت ووُضع على الروبوت، إذ سيكون رأس الروبوت بحجم الكلب.
تم تصميم الروبوت -الذي أطلق عليه الباحثون اسم مورتي Morti- بأجهزة استشعار على قدميه لقياس المعلومات حول حركته.
تعلّم مورتي المشي على الرغم من أنه لم تكن لديه معرفة مسبقة عن تصميم ساقه أو محركاته أو نوابضه، وذلك بالمقارنة المستمرة للبيانات المتوقعة (على غرار الحبل الشوكي الافتراضي) مع بيانات أجهزة الاستشعار في أثناء محاولته المشي.
يوضّح روبيرت: «لقد وُلد الروبوت عمليًا ولا يعرف شيئًا عن تشريح ساقه أو كيفية عملها. مولد الأنماط المركزي يشبه ذكاء المشي التلقائي الذي توفره الطبيعة في الكائنات الحية وحولناه إلى الروبوت. ينتج الكمبيوتر إشارات تتحكم في محركات الأرجل، والروبوت -مثل الكائنات الحية- سيمشي ويتعثر في البداية».
يتابع روبيرت: «تتدفق البيانات عائدة من المستشعرات إلى الحبل الشوكي الافتراضي، إذ تُقارن بيانات المستشعر وبيانات مولد الأنماط المركزي. في حال عدم تطابق بيانات المستشعر مع البيانات المتوقعة، فإن خوارزمية التعلّم تغير سلوك المشي حتى يصحح الروبوت طريقة سيره، دون تعثر. تُقارن بيانات المستشعر من أقدام الروبوت بشكل مستمر مع بيانات اللمس المتوقعة من مولد الأنماط المركزي للروبوت. إذا تعثر الروبوت، فإن خوارزمية التعلّم تغيّر مدى تأرجح الساقين ذهابًا وإيابًا، ومدى سرعة تأرجح الساقين، وطول الساق على الأرض».
يؤكّد روبرت: «إدخال التغييرات على مخرجات مولد الأنماط المركزي مع الحفاظ على ردود أفعال نشطة ومراقبة تعثّر الروبوت هو الأساس في عملية التعلّم».
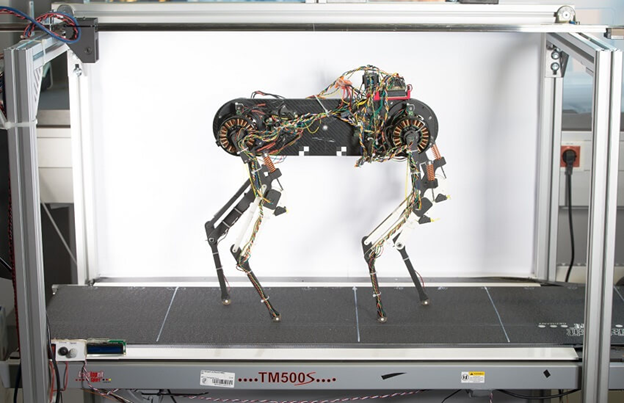
الروبوت مورتي على جهاز السير المتحرك
في غضون ساعة واحدة، تمكن الروبوت مورتي من الانتقال من التعثّر مثل حيوان حديث الولادة إلى المشي، وتحسنت أنماط حركته أسرع من الحيوان وزيادة كفاءة الطاقة بنسبة 40٪.
يقول المؤلف المشارك الدكتور ألكسندر بدري سبرويتز، رئيس مجموعة أبحاث الحركة الديناميكية: «لا يمكننا البحث بسهولة في الحبل الشوكي لحيوان حي، لكن يمكننا نمذجة شي مشابه في الروبوت».
يتابع سبرويتز: «نحن نعلم أن مولّدات الأنماط المركزية هذه موجودة في العديد من الحيوانات، ونعلم كذلك أن ردود الفعل مضمنة في الطبيعة، ولكن كيف يمكننا الجمع بين الاثنين حتى تتعلم الروبوتات الحركات مع وجود ردود الفعل ومولّدات الأنماط المركزية معًا؟ الأمر يستدعي إجراء البحوث حول التقاطع بين علم الروبوتات وعلم الأحياء. يعطينا النموذج الآلي إجابات عن الأسئلة التي لا تستطيع البيولوجيا وحدها الإجابة عنها».
اقرأ أيضًا:
باحثون يطورون طريقة لتعليم الروبوتات مهارات جديدة
روبوت غوغل «لامدا» يحدث ضجة بعد تسريب محادثات تقترح أنه يمتلك وعيًا!
ترجمة: أحمد عضيم
تدقيق: دوري شديد