ربما كانت الحياة على المريخ أقرب مما نعتقد. يخطط الباحثون في كلية الهندسة بجامعة أريزونا لاستكشاف البيئات الجوفية في العوالم الأخرى، ذلك بمساعدة جيش من الروبوتات الجوالة!
تحتوي تلك الروبوتات على أجهزة استشعار مصغرة توزع عند عبور الكهوف أو المسطحات الجوفية.
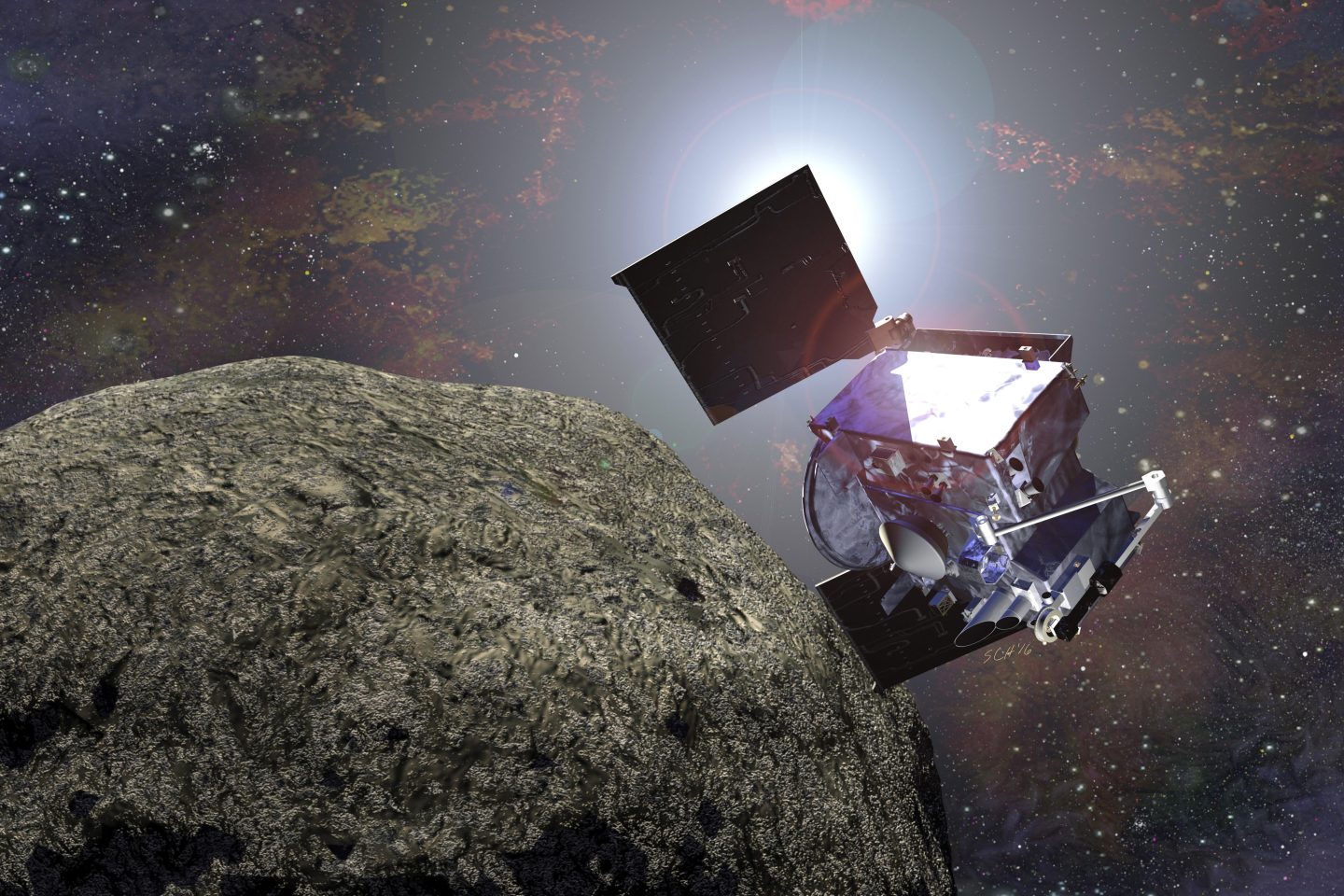
يقول ولفغانغ فينك، بروفيسور الهندسة الكهربائية وهندسة الحواسيب في جامعة أريزونا: «من المتوقع أن تكون الكهوف البركانية موطنًا مثاليًا لرواد الفضاء، لأنك لست مضطرًا لبناء مأوى، فأنت محمي من الإشعاع الكوني الضار، كل ما عليك فعله هو إعدادها لتصبح أنيقة ومريحة».
كتب الباحثون في أطروحتهم: «تربط شبكة الاتصالات الروبوتات الجوالة وروبوتات الإنزال في البحيرات، وحتى الروبوتات الغواصة، من خلال ما يُسمى شبكة الترابط الطوبولوجي، ما يسمح للآلات بالعمل معًا فريقًا واحدًا مستقلًا».
نثر المستشعرات المصغرة:
أطلق العلماء على هذا المفهوم اسم «شبكة الاتصالات الموزعة ديناميكيًا»، اختصارًا (DDCN)، وهم بصدد الحصول على براءة الاختراع لابتكارهم هذه التقنية. وفقًا لفينك، قد يساعد هذا الابتكار على حل أحد أكبر التحديات التي تواجه ناسا في تكنولوجيا الفضاء، بالتغلب على القدرة المحدودة للتكنولوجيا الحالية، وتحقيق العبور الآمن في بيئات المذنبات والكويكبات والأقمار.
تتصل الروبوتات الجوالة بواسطة الاتصال اللاسلكي للبيانات وتوزيع نقاط الاتصال. إضافةً إلى المراقبة المستمرة للبيئة المحيطة، يضع الروبوت نقطة اتصال فور شعوره بتلاشي الإشارة، بصرف النظر عن المسافة التي قطعها بعد وضع النقطة السابقة.
تحرُّر روبوتات الاستكشاف بعد أداء مهمتها:
يقول فينك: «لا تحتاج الروبوتات الجوالة إلى من يقودها، بل يشق كل روبوت طريقه بمفرده. يسمح مفهوم شبكة الاتصالات للفريق الآلي بالتنقل حتى في البيئات المعقدة تحت السطح، دون فقدان الاتصال بالروبوت الأم».
تُرسل جميع البيانات التي جمعتها روبوتات الاستكشاف إلى المركبة الأم على السطح، وعلى هذا فلا حاجة إلى استعادة الروبوتات ذاتها.
يقول فينك: «بدلًا من هدر الموارد بإدخال الروبوت إلى الكهف ثم إخراجه، سيكون من المنطقي أن نرسله إلى أقصى حد ممكن ثم نتركه في الموقع بعد إنجاز المهمة، أو حتى نفاد طاقته».
قال ديرك شولتز، رئيس الجمعية الألمانية لعلم الأحياء الفضائية ومؤلف العديد من المنشورات حول الحياة خارج كوكب الأرض: «يبشر نهج شبكة الاتصالات المقدم في هذه الأطروحة بعصر جديد من الاكتشافات الكوكبية والبيولوجية الفلكية. إذ يسمح لنا أخيرًا باستكشاف الأماكن التي قد توجد فيها حياة خارج كوكب الأرض، مثل الكهوف البركانية المريخية والمحيطات الجوفية للأقمار الجليدية».
ملخص الدراسة:
«نقدم نموذج شبكة الاتصالات الموزعة ديناميكيًا (DDCN) باستخدام طوبولوجيا شبكية، لدعم نهج آلي متعدد الأدوات، موزع للاستكشاف الذاتي للبيئات الجوفية، مثل الكهوف البركانية والبحيرات والمحيطات. تشمل شبكة الاتصالات مستشعرات منشورة بشكل مستقل بواسطة روبوت جوال أو غاطس بمسار تنقل، تسمح بأطول وأقوى رابط اتصال بين الروبوتات داخل كهف أو محيط جوفي مثلًا، والروبوتات على السطح».
«نتطرق بإيجاز إلى تطوير قاعدة اختبار روبوتية ومستشعرات اتصالات سلكية ولاسلكية لدعم سيناريوهات استكشاف المواقع البيولوجية الجوفية. حُدّدت الكهوف البركانية المرشحة على القمر والمريخ، ما يزيد من احتمالية استكشاف الكواكب، وتطوير علم الأحياء الفلكي، وبناء المساكن لرواد الفضاء في المستقبل، وعمليات التعدين المحتملة».
«توفر الكهوف الجوفية، لا سيما الكهوف البركانية العميقة نسبيًا، ملاذًا محتملًا للحياة في ظل الظروف الصعبة على سطح الكواكب، على هذا فهي ذات صلة بيولوجية فلكية. قد تكون الكهوف البركانية أو غيرها من البيئات الجوفية ملاذًا مناسبًا لرواد الفضاء والمستوطنات البشرية المستقبلية، لكنها لم تُكتشف تمامًا بعد بسبب الصعوبات في ضمان التواصل المستمر مع الروبوت الجوال ضمن هذه البيئات».
«كان وجود المحيطات الجوفية في الأقمار، مثل أوروبا و إنسيلادوس وتيتان، مدعومًا بمستويات مختلفة من الأدلة منذ الثمانينيات. هذه البيئات محمية أيضًا من الإشعاع، ومع الوجود المفترض للمياه، فهي بيئات مرشحة إضافية للعثور على حياة باقية أو أحفورية. يعالج نموذج شبكة الاتصال المقدم هنا مباشرةً التحديات الكبرى التي تواجه ناسا في تكنولوجيا الفضاء، بتمكين الاستكشاف غير المقيد للبيئات الجوفية، بواسطة شبكة اتصال ديناميكية تضمن نقل البيانات من الروبوت الجوال تحت السطح».
اقرأ أيضًا:
هل سيتمكن الذكاء الاصطناعي المتقدم مستقبلًا من حل كل المسائل في عالمنا؟
تطوير روبوت يمكنه تغییر حالته المادية بين السائلة و الصلبة!
ترجمة: حنا مسيكه
تدقيق: هزار التركاوي